| *1 - Borehole
The borehole consits of two parts: A small real borehole connected
via tube with the „Mobile Borehole“, hidden beneath
it.
*2 - Mobile Borehole
A box located beneath the real borehole, containing the „Vertigo-Technology“,
which simulates a borehole with a depth of 120m and allows a fictitious
probe diving tour into the depths depending upon probe-line handling
and finger tip sensation.
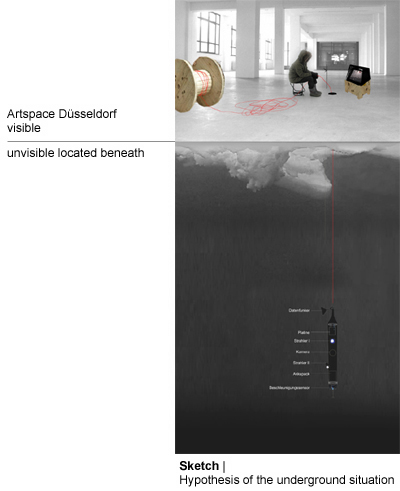
*3 - Vertigo-Technology
Located in the „Mobile Borehole“, this is a self-constructed
system consisting of electronics, sensors, mechanics, motor, spool
and the probe-line. This system enables a 50m probe-line to be lowered
down/pulled up and simulates the weight and movement of a probe
at the end of the line, as it is navigated through the depths.
Furthermore the system transfers the line movements and „probe“
depth data up to the PC with the software application „Wankel“.
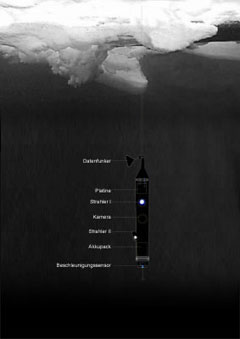
*4 - Probe
The probe is the result of all technology together. You feel the
probe diving through the broehole between your fingers. You can
see its diving tour, its passing by hidden worlds and horizons displayed
on the monitor. The motor inside the Mobile Borehole is controlled
by line movements and depths and gives the line an impression of
weight and its own life, e.g. the deeper the probe line is, the
„heavier“ it becomes (to simulate gravity).
*5 - Wankel software
The software, called „Wankel“, is written in MaxMSP/Jitter
and navigates in real time through the application „Deep Ice“
according to probe-line movements and finger tip sensations.
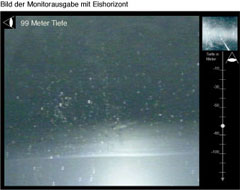
*6 - Deep Ice
„Deep Ice" are video images, transmitted from 2 cameras
located on the fictitious probe which are displayed on a monitor
next to the borehole.
Video footage, recorded inside real antarctic drilling holes (kindly
supported by JPL / Jet Propulsion Laboratory / NASA), are integrated
into the application in real time as well as elements of a fictitious
“ice world”.
|